
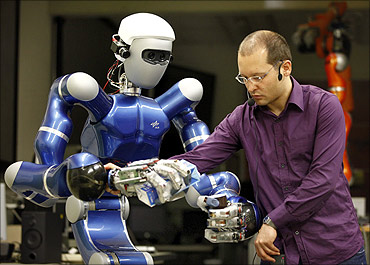
Meet the humanoid two-arm system robot, Rollin Justin or RJ.
RJ has been designed with the ability to catch a ball thrown at it with 80 per cent accuracy. This means Justin is probably as accurate as we are when it comes to catching balls thrown in the air.
...

A German air and space agency, Deutsches Zentrum fuer Luft und Raumfahrt (DLR), first introduced this robot in 2009.
Alexander Dietrich of (DLR), works at humanoid two arm system robot Justin during a presentation in Oberpfaffenhofen near Munich, Germany.
...

The sensors and cameras allow the 3D reconstruction of the robot's environment and therefore enable Justin to perform given tasks autonomously, such as catching balls or serving coffee.
Basically, he can track thrown objects as they approach, calculate their flight path, and snap his cold, soulless hands around them before they hit the ground. Better yet, he can catch two objects at the same time.
...

The mobile robotic system Justin is compliant with controlled light weight arms and two four finger hands.
Rollin' Justin can move his hand to the predicted spot in only five milliseconds. For his encore, Rollin' Justin uses his tactile finger sensors to prepare you a cup of coffee.
The robot can be controlled via iPad.
...
Researchers predict that humanoids will gain prominence across various domains such as in household chores and in space explorations.
Scientists around the world are conducting active research when it comes to developing a humanoid robot with two-handed manipulation.
...
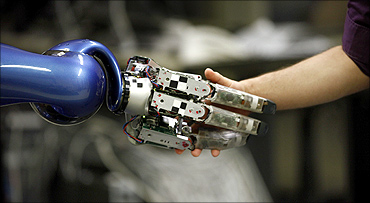
Alexander Dietrich of the German air and space agency, Deutsches Zentrum fuer Luft und Raumfahrt (DLR), shakes the hand of the humanoid robot Justin.
...

The processing power needed to predict the flight path is so large that RJ relies on an external computer.
Also, RJ comes with head-mounted stereo cameras, which assist him to perform tasks.
...

Justin is used to test programming and control concepts for two-handed mobile manipulation.
However, RJ does not have human-like legs; instead it uses wheels to move from one place to another.
...

RJ can even wield a paper cup with enough delicacy to not splash it all over his hands, which is pretty impressive for a robot.
It is only a matter of time though before robots are capable of carrying around digital brains that are powerful enough to perform such jobs without requiring an external computer.









